
Simanaitis Says
On cars, old, new and future; science & technology; vintage airplanes, computer flight simulation of them; Sherlockiana; our English language; travel; and other stuff
HAPTICS—A TOUCHING TOPIC
ROBOTS DO a great many things better than their human counterparts, but they have yet to achieve our sense of touch. “Brainy, Yes, but Far From Handy,” by John Markoff, addresses this topic in The New York Times, September 1, 2014 (http://goo.gl/TaASgR). Especially interesting is Markoff’s discussion of haptics, the technology of tactile feedback.
“Haptic” comes from ἅπτικός, the Greek word pertaining to the sense of touch. In its most general sense, haptics is any form of nonverbal communication involving touch. The haptics of greeting, for instance, vary around the world. In the U.S., shaking hands is common; hugs, among friends. In Hollywood, air kisses, near touches on each cheek, are familiar.
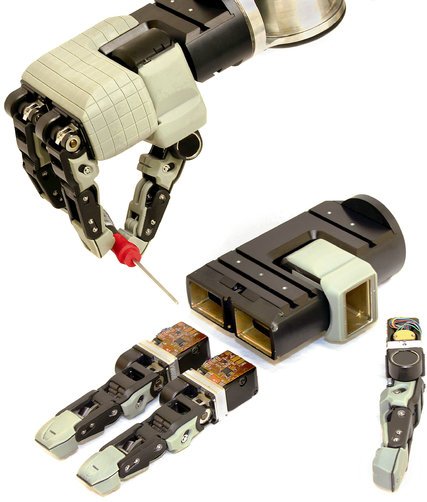
Robotic devices need to give tactile feedback to their users. Image by HDT Robotics from The New York Times.
Haptic technology involves artificial feedback offered in response to an automated action. At its most familiar, it’s the touch of a computer keystroke that confirms success. At the other extreme, it’s offering a doctor tactile feedback in robotic surgery.

The master controller of a DaVinci surgical robot. Image by Akiko Mabeshima in The New York Times.
Robotic pioneer Hans Moravec recognized the challenge in 1988, with what’s now called the Moravec Paradox: “It is comparatively easy to make computers exhibit adult-level performance on intelligence tests or playing checkers, and difficult or impossible to give them the skills of a 1-year-old when it comes to perception and mobility.”
Observes The New York Times article, “Humans have an array of organs that allow them to sense pressure, sheer forces, temperature and vibration with remarkable precision.”
Last year, Swedish researchers identified the amazing sensitivity of human touch. A finger sliding across a surface can distinguish ridges no higher than 13 nanometers (about 0.0000005 in.). Mark Rutland, one of the researchers, put this in perspective: If your finger were as big as the earth, it could feel the difference between a car and a house. See Feeling Small: Exploring the Tactile Perception Limits (http://goo.gl/wkWqnr) for details of this research.
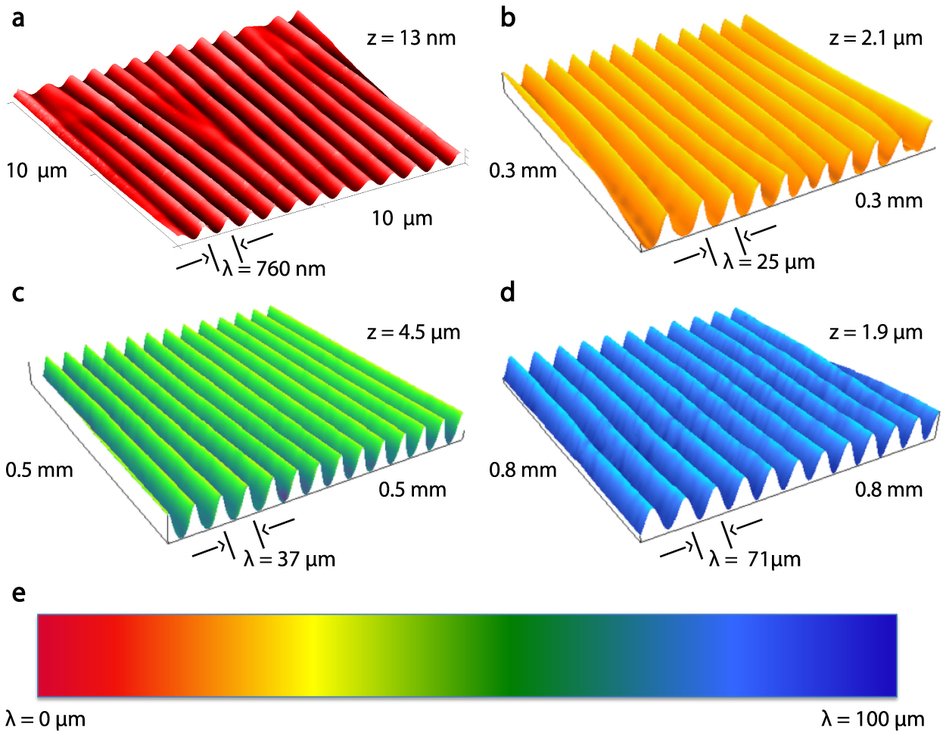
Examples of nano to micro surfaces identified by human tactility. Nano dimensions are at the molecular level of matter. Image from Feeling Small: Exploring the Tactile Perception Limits.
Haptic technology strives to replicate human tactility in a variety of ways. Coordinating kinematics with optics is one approach. A robot making a stack of blocks uses its automated vision as well as position- and force-sensing. The article in The New York Times (http://goo.gl/TaASgR) contains a video of this, a task that’s easy for a child, yet challenging for a robot. Another video there shows a bomb-defusing bot at work.
What’s more, robot actions and responses occur within a timeframe of perception. Motion simulators, for instance, are especially sensitive to timing of artificial feedback. Bumps that differ only slightly from their sound or visual cues can cause nausea in users.
These are evolving capabilities. Perhaps 25 years ago, an auto engineer described what can happen when a robotic production line went awry. Automated arms poked holes in door panels, then wrenched them off their hinges and tossed them aside, all because of a slight miscue of programming.
This reminds me of futurist author Isaac Asimov and his Three Laws of Robotics, as introduced in his 1942 short story Runaround (while in his early twenties) and also appearing in his 1950 collection I, Robot.
Isaac Asimov’s views on robotic ethics are contained in I, Robot
Here are Asimov’s ethical principles under which robots should operate: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey the orders given by human beings, except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Back in 1942, futurist though he was, Asimov couldn’t have anticipated the ethical quandary of robots tossing automotive doors around. ds
© Dennis Simanaitis, SimanaitisSays.com, 2014
