
Simanaitis Says
On cars, old, new and future; science & technology; vintage airplanes, computer flight simulation of them; Sherlockiana; our English language; travel; and other stuff
ON MANUAL DEXTERITY
EACH DAY I do tasks that the best of robots cannot yet accomplish: I grasp more than one object with one hand.

In feeding our kitties, I manipulate cat bowl, measuring cup, and even occasionally my cell phone, all held by one hand. I thought little of this manual dexterity until reading “Trends and Challenges in Robot Manipulation,” by Aude Billard and Danica Kragic, in Science, June 21, 2019.

Billard is at Switzerland’s Learning Algorithms and Systems Laboratory, École Polytechnique Fédérale de Lausanne; Kragic is at Sweden’s Robotics, Perception and Learning, Royal Institute for Technology, Stockholm. They write, “Our ability to grab, hold, and manipulate objects involves our dexterous hands, our sense of touch, and feedback from our eyes and muscles that allow us to maintain a controlled grip.”

This and the following image are from Science, June 21, 2019.
Such a maneuver is natural for humans. However, as Billard and Kragic note, “Whereas a human can grab multiple objects at the same time, a robot cannot yet achieve such dexterity.”
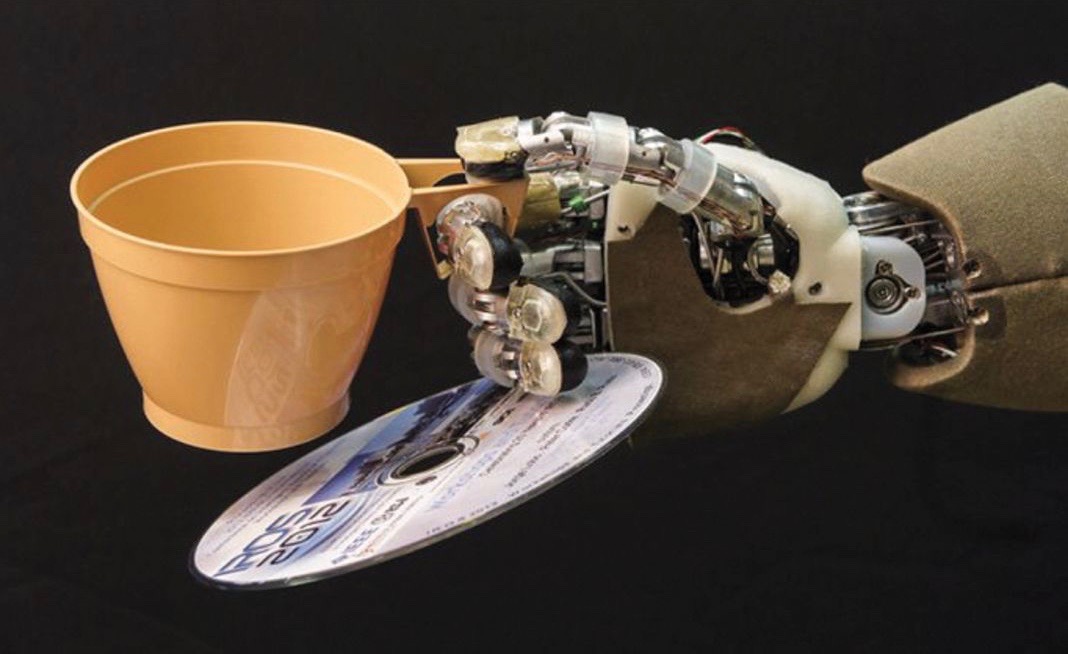
This photo was arranged by a human first placing the objects in the robot’s hand.
Robotic Manipulation History. As described in their paper, the first robotic manipulators date from the 1960s. These could handle sequences of carefully prescribed movements, but had no ability to adapt to a changing environment.
Over the years, artificial intelligence and automated reasoning gave robots more dexterity. “However,” the researchers observe, “none of these actions truly demonstrated fine or in-hand manipulation capabilities, and they were commonly performed using simple two-finger grippers.”
Advances. Billard and Kragic write, “Roboticists are still working to develop robots capable of sorting and packaging objects, chopping vegetables, and folding clothes in unstructured and dynamic environments.”
However, the researchers note that, to ensure human safety, robots used in modern manufacturing still require fences between them and human operators.
A Trusting Environment. Billard and Kragic see a next major challenge: achieving robust and flexible cooperation between robots and humans. Fences will gradually disappear as robots manipulate objects jointly with humans.
“To achieve this objective,” the researchers note, “robots must become smooth and trustable partners that interpret humans’ intentions and respond accordingly.”
Giving robots enhanced dexterity is an important aspect of this. I wonder when a robot will manipulate a cell phone with one hand while taking a snapshot of the other hand holding a cat bowl, a measuring cup, and another cell phone. ds
© Dennis Simanaitis, SimanaitisSays.com, 2019
